POSE это эмулятор PalmOS-based машин. Существует версия для UNIX, MacOS, Windows. Исходники можно найти на соответствующей странице. Для дистрибутивов ALT Linux достаточно дать команду apt-get install pose. Так-же доступны пакеты pose-skins и pose-doc. Пакет pose-skins нужен для корректной работы с конкретными моделями Palm. Доступны шкурки для Palm, Handspring, Workpad, HandEra разных моделей.
Для работы понадобиться ещё и пакет rom-image, который по лицензионным ограничениям распространяться в составе дистрибутива не может. Для получения ROM Image Files необходимо подписаться на Palm OS Developer Program. Также можно скопировать ROM с самого устройства Palm. Для этого надо:
Установить и настроить пакет pilot-link (см. соответствующий раздел в “Руководстве пользователя”);
Установить на Palm программу getrom2.prc:
pilot-xfer -i /usr/share/pilot-link/getrom2.prc
Для старых моделей, с объёмом ROM в 512 КБ можно использовать getrom.prc;
Запустить на “пальме” установленную программу getrom и нажать кнопку Start. В Linux запустить программу pi-getrom;
Полученный pilot.rom можно загружать в POSE.
Замечание
На последних моделях Palm getrom2.prc использовать нельзя. Достаточно нажать кнопку синхронизации и запустить pi-getrom.
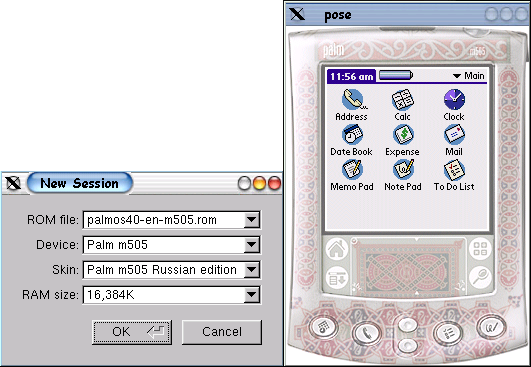
Теперь можно запустить и настроить POSE. В открывшемся окне POSE нажатием правой кнопки мыши вызывается меню. Выберите пункт New и заполните поля:
В поле ROM file надо открыть пункт Other и выбрать файл, скачанный с помощью pi-getrom;
В поле Device появиться номер модели;
В поле Skin выберите шкурку;
В поле RAM size — размер памяти вашего виртуального “палма”;
Вот как выглядит у меня POSE, настроенный на Palm m505:
Теперь можно устанавливать и отлаживать программы.